













October 2021 - Ongoing
Sponsor: the National Highway Traffic Safety Administration
Collaboration with TRC Inc. and Toxcel
Automated Driving Systems (ADS) offer the potential to reduce crash-related deaths and injuries, improve access to transportation, reduce traffic congestion and emissions, and improve productivity and quality of life for millions of people1. To realize these benefits, ADS vehicles utilize complex sensors, processing, algorithms, and controls to avoid many of the crash scenarios that occur today with human drivers and aspire not to introduce critical new crash scenarios. In addition to addressing safety in the design and development of ADS, methods for establishing and maintaining safe operations throughout deployment may also become an important part of the public’s acceptance for ADS-equipped vehicles.
One of the promising opportunities of ADS deployment is their operations in a “mobility as a service” model using highly automated vehicles. Companies, or fleet operators, such as Waymo and Uber, among many others, have started to develop and/or pilot-test such services in a few pilot locations in the country. To ensure safe operations of highly automated vehicles (e.g., SAE Level 4), operational safety oversight becomes very critical and it is principally the responsibility of the fleet operator. Operational safety responsibilities of the fleet operator may include roles, functions, and aspects related to: inspections; dispatching; maintenance and repair; ODD-related vehicle usage; in-service health and status monitoring; incident response; crash investigation and reporting; teleoperations; staffing; training; recordkeeping, and other related functions. Correct and consistent adherence to policies, procedures and strategies to achieve the ADS relevant operational safety responsibilities will likely be essential to facilitate safe, ongoing operations of ADS-equipped vehicles within the fleet. Put simply, the fleet operator may play a large role in the safety of ADS-vehicles deployed in commercial “mobility as a service” models.
Objectives
The project focuses on identifying safety risks associated with ongoing ADS fleet operations and the responsibilities and activities (i.e. policies, procedures, and strategies) of the fleet operator to mitigate such risks. Special attention should be given to those fleet responsibilities and activities which are particularly important for maintaining safe operation of ADS vehicles. Further, the project seeks to identify relevant operational safety best practices being applied by commercial vehicle fleets (light and heavy duty), ADS developers who are beginning to operate ADS fleets; and potentially, other transportation modes such as aviation, rail, and buses.
People
Principal Investigator: Prof. Ali Mosleh
Co-Principal Investigator: Prof. Jiaqi Ma
Principal Researcher: Dr. Marilia Ramos
Graduate Student Researcher: Camila Correa Jullian
Related Publications
CORREA-JULLIAN, C.; MCCULLOUGH, J.; RAMOS, M.; MA, J.; DROGUETT, E.; MOSLEH, A. Modeling Fleet Operations of Autonomous Driving Systems in Mobility as a Service for Safety Risk Analysis. In Proceedings of the 32nd European Safety and Reliability Conference (ESREL), Dublin, 2022. Download.
CORREA-JULLIAN, C.; MCCULLOUGH, J.; RAMOS, M.; MA, J.; DROGUETT, E.; MOSLEH, A. Safety Hazard Identification for Autonomous Driving Systems Fleet Operations in Mobility as a Service. Proceedings of the Probabilistic Safety Assessment and Management Conference PSAM 16, Hawaii, 2022. Download.
RAMOS, M.; CORREA-JULLIAN, C.; MCCULLOUGH, J.; MA, J.; MOSLEH, A. Hazard Identification Framework for Level 4 Automated Driving Systems Fleet Operational Safety in Mobility as a Service. Presented at the Society for Risk Analysis (SRA) Annual Meeting, Tampa, Florida, 2022.
CORREA-JULLIAN, C.; MCCULLOUGH, J.; RAMOS, M.; MA, J.; MOSLEH, A. Safety Hazard Identification for Autonomous Driving Systems Fleet Operations in Mobility as a Service. Presented at the Transportation Research Board (TRB) Annual Meeting, Washington, DC, 2023.
RAMOS, M.; CORREA-JULLIAN, C.; MCCULLOUGH, J.; MA, J.; MOSLEH, A. Automated Driving Systems Operating as Mobility as a Service: Operational Risks and SAE J3016 Standard. Presented at the Annual Reliability & Maintainability Symposium (RAMS), Orlando, Florida, 2023.

2020 - Ongoing
The Concurrent Task Analysis (CoTA) builds upon Task Analysis (TA) theory and methods. TA was developed in the 1960s and had the initial focus of analyzing human performance. TA has since developed, influenced by the technical challenges in the Human-Computer Interaction (HCI). The CoTA follows a systems perspective rather than emphasizing human performance only: The flexibility of the plans of TA and its hierarchical structure allows modeling the expected behavior of a diversity of parts of the system. Moreover, the re-description of the goals into sub-goals allows the identification of specific tasks in the desired component level. For instance, since a task in software engineering is a computational operation that can be executed concurrently with other computation tasks, it is possible to apply TA in software reliability analysis. A task is thus a function or a function object of a software program. Indeed, TA is similar to a functional decomposition that is often carried out during software development. CoTA adopts the IDA – Information, Decision and Action model, initially developed as a human behavior model of the response of a nuclear power plant crew under accident conditions, to model different agents of a system. This is particularly useful when analyzing the interaction between two or more agents, as it allows for decomposing functions into the same low-level unit of analysis.
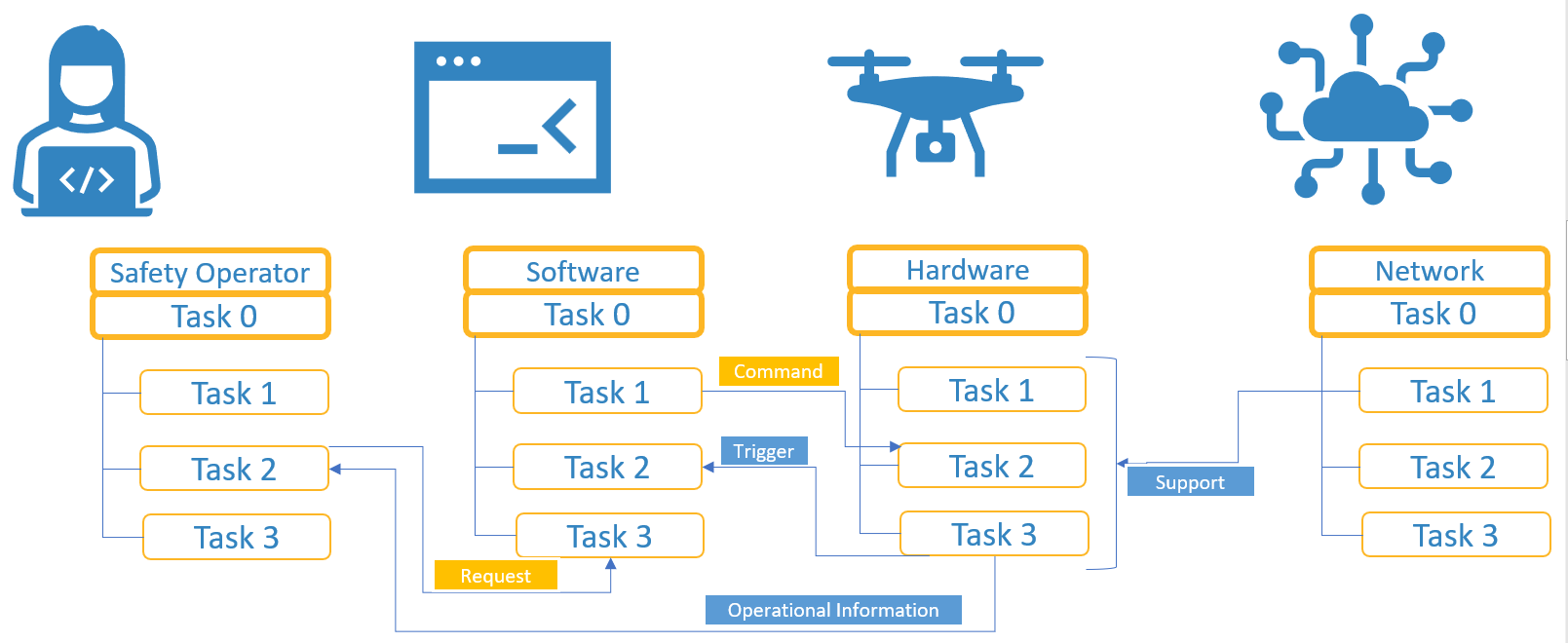
An important element of TA is the stop rule, which determines when a re-description should end. Without an appropriate stop rule, re-description may continue indefinitely. CoTA provides specific stop rules that include
explicit modeling of the IDA phases,
identification of interface tasks, which provide input or receive an input from another agent in the from of a command, a request, or data transfer,
identification of parallel tasks, which should be performed at all times and support the execution of the other tasks,
modeling trigger tasks, of which outcome determines the execution of a subsequent task.
The COTA was initially developed in the context of Maritime Autonomous Surface Vessels (MaSS). It has been applied to Autonomous Remotely Operated Vehicles (AROVs). Current developments include extensions and formalization of tasks types, and application to Autonomous Driving Systems and Autonomous Ferries operations. The CoTA can be used for multiple purposes, such as the development of procedures, identification of specific subsystems and components that are necessary for a successful task, identification of failure sources of the human operator or the autonomous system, of tasks that need to be accomplished for a certain outcome, of interface tasks, and analysis of failure propagation.
People
Dr. Marilia Ramos
Dr. Christoph Thieme
Related Publications
GARRICK, J.; MOSLEH, A. Embracing the Risk Sciences to Enhance Air Travel Safety. The Bridge - National Academy of Engineering. June 2020. https://www.nae.edu/234440/Embracing-the-Risk-Sciences-to-Enhance-Air-Travel-Safety
RAMOS, M.; THIEME, C.; UTNE, I.; MOSLEH, A. A generic approach to analysing failures in human – System interaction in autonomy. Safety Science, v. 129. September 2020. ;https://doi.org/10.1016/j.ssci.2020.104808.
RAMOS, M.; THIEME, C.; UTNE, I.; MOSLEH, A. Human-System Concurrent Task Analysis for Maritime Autonomous Surface Ship Operation and Safety. Reliability Engineering and System Safety, v. 195, March 2020. https://doi.org/10.1016/j.ress.2019.106697
RAMOS, M.; THIEME, C.; YANG, X. Human-System Concurrent Task Analysis: An Application to Autonomous Remotely Operated Vehicle Operations. Proceedings to ESREL 2020 PSAM 15, Venice, 2020

2022 - Ongoing
The AMT pool fund program has recently funded a tabletop analysis of different types of crash scenarios and the subsequent actions by different stakeholders. However, ATMA deployment risks are more than the ones during and after the crash. It is also critical to understand the potential major operational safety risks of ATMA deployment, before the crashes occur, and it is equally or even more important to identify countermeasures to prevent those crashes from happening. Identified and quantified risks and their impacts can further guide DOTs to prioritize these risks and work with DOT engineers to deploy corresponding countermeasures to ensure safety during ATMA deployment and generate additional product requirements.
The objective of the study is to identify safety risks associated with ATMA operations and the activities (i.e. policies, procedures, and strategies, as well as new technology functional requirements) for DOTs to mitigate such risks. Special attention is given to those activities which are particularly important for maintaining safe operation of ATMA. Further, the project seeks to identify risk mitigation strategies and best practices that can be borrowed from other automated driving system community (e.g., automated passenger vehicle, automated commercial vehicles/CMV).
The outcome of the project can be directly adopted by CDOT and other DOTs to identify risks of ATMA deployment and develop corresponding strategies. This is a necessary step that accelerates the future widespread deployment ATMA technologies for work zone safety. The benefit can be measured by directly calculating the avoided safety risks after adopting the results of this study. The long-term benefit can be measured by the accelerated deployment of ATMA to improve work zone safety and traffic efficiency.
People
Dr. Jiaqi Ma
Dr. Xianbio Hu (Pennsylvania State University)
Maynard J. Factor (Kratos Defense)


Various automated systems require human supervision in complex environments which can be a monotonous task but still requiring a significant degree of attention. If those tasks are decisive to the process and work safety, then it is imperative that operators maintain adequate levels of alertness to execute necessary actions. Specially, the consequences of performance failure by operators in safety-critical task scenarios has increased concerns and drove important research since inattention or distraction could negatively affect the entire system including the integrity of the people on the system.
Despite highly reliable equipment, complex safety management regimes, and modern automation and control systems employed in industries, human operators still have a central role in the execution of complex tasks in which cognitive functions (e.g., working memory, attention, information processing speed) strongly influence their performance – particularly in emergency situations. In addition, high demands in life outside of work, i.e., sleep disturbances and stress, increase factors that may hinder humans from responding effectively to their tasks. This project aims to develop distinct methodologies for drowsiness detection considering visual information (e.g., eyes pattern, blink, gaze, head pose) as well as biological information (e.g., brain waves, skin conductance) and artificial intelligence-based models.
People
Prof. Caio Souto Maior



