ADS-IDAC
/
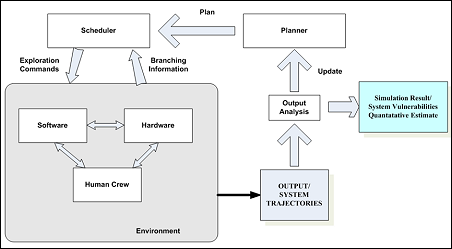
Dynamic probabilistic risk assessment (PRA) methods can improve nuclear power plant PRAs by providing rich contextual information and an explicit consideration of feedback arising from complex equipment dependencies and operator actions. The Accident Dynamics Simulator paired with the Information, Decision, and Action in a Crew context cognitive model (ADS-IDAC) is one such dynamic method that can be used for nuclear power plant risk assessments.
Read More